
Добавь сайт в закладки нажми CTRL+D
Представьте себе устройство, которое быстро передвигается по поверхности нашего естественного спутника, выполняя одновременно строительные и научные задачи. Оно способно чинить оборудование, проводить эксперименты, собирать образцы грунта и даже анализировать их прямо на месте. Такой помощник окажется незаменимым в труднодоступных местах, где работа осложнена ограниченным пространством и труднопроходимостью.
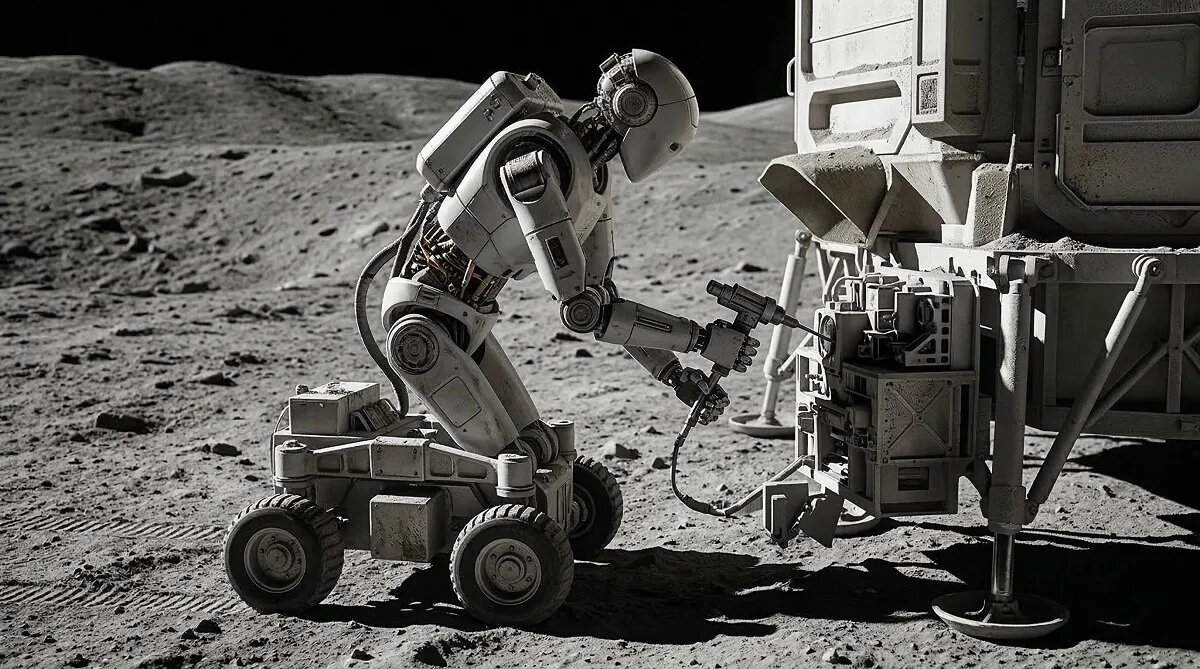
Ключевое достоинство китайского изобретения — подвижная талия, позволяющая устройству вращаться на 180 градусов в обе стороны и наклоняться на 90 градусов вперед. Это обеспечивает точное позиционирование инструментов и облегчает доступ к нужным объектам.
Но не менее важной деталью стала рука-манипулятор. Инженеры пошли дальше простого захвата и оснастили её шарнирной кистью с четырьмя степенями свободы. Теперь робот способен бережно обращаться с объектами, выполняющими тонкие манипуляции вроде сборки механизмов или установки приборов.
Идея колесной схемы пришла не случайно. По словам разработчиков, активные подвески позволяют роботу двигаться гораздо быстрее и стабильнее классических двуногих моделей. Благодаря этому верхняя часть аппарата становится устойчивой опорой для рабочих операций.
Стоит отметить, что китайская сторона уже имеет успешный опыт эксплуатации колесных устройств на небесных телах. Примером служат луноходы Yutu и марсоход Zhurong. Новые разработки предусматривают использование легких металлических сетчатых колес с металлическими шипами, обеспечивающими отличное сцепление с поверхностью даже в экстремальных температурных условиях.
«Человек сверху, машина снизу»: новая концепция китайской космонавтики вдохновлена идеей американской программы Robonaut, запущенной NASA и General Motors ещё в 2011 году. Но китайцы решили пойти дальше, применив подобную концепцию не на орбите, а непосредственно на поверхности Луны, где роботы смогут заниматься тяжелой работой и обслуживанием инфраструктуры.
Проект входит в масштабные планы Китая по созданию Международной лунной исследовательской станции (ILRS). Эта база, расположенная на южном полюсе Луны, позволит вести долговременные исследования с периодическими визитами астронавтов и минимальным участием людей в повседневной работе благодаря широким возможностям роботизации.
Следующим важным шагом станет миссия Chang’e-7, запланированная на конец 2026 года. Она направлена на изучение возможного наличия водного льда в вечно затенённых кратерах южного полюса Луны.
Кроме того, параллельно разработана ещё одна интересная идея — логистический модуль с шестью ногами. Этот аппарат может приземляться на поверхность Луны, нести грузы и служить основой транспортной сети будущей станции.
Таким образом, китайский проект создает основу для построения уникальной экосистемы роботов и транспортных средств, готовых поддержать амбициозные космические начинания Поднебесной.
Поделись видео:




